Cliquer sur les textes en gras pour accéder directement à un complément d’explication.(en cours de rédaction…) Le matériel RC qui est présenté ici est du matériel réellement testé en vol ou et aussi sur banc pour les servos. C’est libre de toute publicité!
J’ai assuré les tests de radio commandes du commerce durant de nombreuses années dans la revue RCM puis parfois dans la revue RCpilot. Je disposais en effet de matériel de test professionnel: analyseur de spectre, oscilloscopes large bande, générateurs et alimentations diverses. J’ai réalisé plusieurs radio commandes pour le plaisir et j’ai beaucoup appris en compétitions et durant les stages de pilotage en montagne.
J’utilise actuellement, et depuis 3 ans (en 2024), principalement deux types d’émetteurs: une Core avec l’option M’Link, protocole propriétaire de Multiplex afin de continuer à utiliser mes nombreux récepteurs Multiplex et une Cockpit 12 voies en double commande pour les planeurs d’écolage. La Cockpit a été modifiée pour l’utiliser en position pupitre afin d’avoir une référence stable pour le pilotage de précision et aussi pour diminuer la fatigue dans les longues séances de vols. Les supports de la Cockpit sont démontables pour permettre le transport de la radio dans une petite boite glissée dans le sac à dos.

La Core a aussi été modifiée pour l’adapter au vol thermique de relief. La voltige en montagne conduit souvent le planeur en dessous des pieds, sans compter les aérologies défaillantes. Il est donc nécessaire d’assurer une portée suffisante vers le bas, ce que l’antenne de la Core n’assure pas toujours à cause de son orientation fixe vers le haut. Les pilotes américains de jets ont parfaitement compris l’intérêt de cette radio en terme de sécurité, quand elle est utilisée sur un terrain classique horizontal. En vol thermique de relief et en voltige totale, on pilote à hauteur des yeux et si le planeur descend trop, il se trouve dans l’axe du plan réflecteur de l’antenne patch et peut ne plus être commandé. J’ai donc modifié la boite qui protège les antennes pour pouvoir l’orienter vers l’horizon ou même vers le bas. 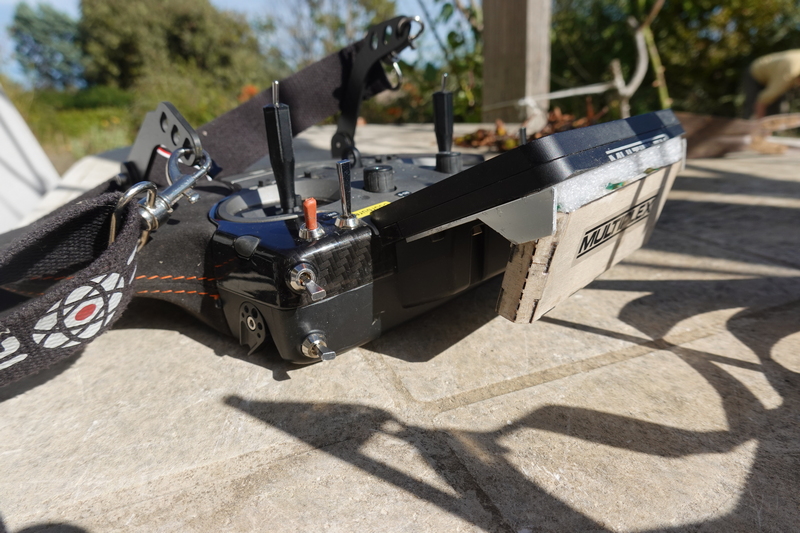
Ce dispositif demande un peu d’adresse manuelle pour être réalisé, mais les modélistes n’en manquent pas. Le fabricant pourrait modifier son boîtier pour rendre son émetteur vraiment universel. Les solutions ne manquent pas avec l’impression 3D.
Ceci me permet de conserver cet émetteur remarquable:
- Manches à effets Hall donc inusables, ( structure usinée dans la masse et sur roulements)
- Dialogue de configuration de l’émetteur intuitif, assuré via PC sous Linux, intégré à l’émetteur.
- Tout peut se contrôler sur le terrain sans recours à un PC maison.
- Grande autonomie pour de longues séances de vol sur plusieurs jours sans recharger.
- Contrôle des donneurs d’ordre et des servos selon des courbes très précises qui rendent le pilotage très fin donc agréable.
- Affichage très claire des données de vol transmises par les capteurs embarqués (M’Link)
- Écolage en double commande sans fil avec n’importe quel autre émetteur disposant d’un récepteur avec sortie PPM.
- Phases de vol complètement configurables avec enchainement logiques des commutateurs afin d’avoir un minimum de commandes à manipuler.

A droite, le Tx Core avec ses interrupteurs de manche pour certaines phases de vol (vrille à plat et pleins débattements sur tous les axes) et les interrupteurs de choix des phases de vol:
Poser / Voltige,
Vrille plate,
Pleins débattements d’empennage
Il y a aussi les courbures fixes à 3 états selon les conditions aérologiques (à droite)
Le manche de commande de gauche contrôle l’empennage et le manche de droite commande l’aile: roulis et courbure en phase voltige et les aérofreins crocodiles et le moteur en phase poser.
Ça permet de poser très court sur des terrains très inclinés (45°)
A la suite des récepteurs Multiplex dont j’apprécie la fiabilité depuis de très nombreuses années, j’utilise principalement les servos numériques HV de chez Hitec. Ils sont programmables (DPC11) ce qui me permet d’utiliser les commandes à 180° typiques de mes planeurs, utiles pour la voltige totale.
Ces servos ont d’abord été testés sur banc de mesure et ensuite en vol dans des conditions très variées.
D89 et MD89 pour l’empennage (Troll, Sigma)
MD250 pour l’incidence différentielle (Troll, et empennage du Sigma)
D145MG pour les ailes (ailerons et flaps)
De plus gros servos pour le Sylphe (3m 4kg).
Le M indique un capteur de position à effet Hall qui rend le servo quasiment inusable.
Ma notice de la Core (utilisable pour l’Atom): bientôt…
L’article ci dessous est une publication un peu ancienne qui a été rédigée à la demande de nombreux modélistes expérimentés qui cassaient leurs modèle lors des posés.
Antennes RC en question: ici le *.pdf de l’article.
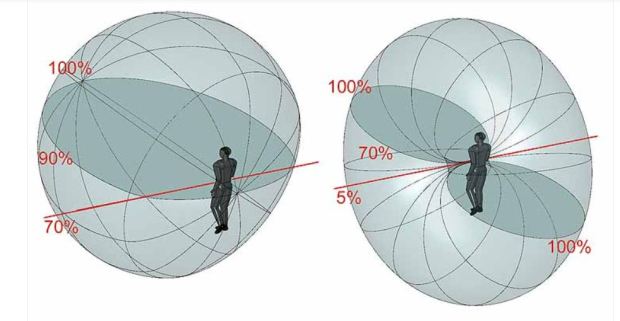
Comparaison des diagrammes de rayonnement d’une antenne patch à gauche et d’un unique brin parallèle à l’axe rouge.
Les liaisons de radio commande s’effectuent depuis quelques années en 2.4GHZ selon des protocoles propres à chaque fabricant. Cette utilisation de la bande Wifi n’est pas sans poser quelques problèmes de sécurité. En premier lieu les antennes sont aux premières loges. Pour en savoir plus, télécharger le document *.pdf ci-dessous:
Il s’agit d’un article publié dans « Aéromodèles » à la demande de la FFAM suite à mes nombreux essais de radiocommandes dans les revues papier d’aéromodélisme.
Le banc de test des servo-moteurs me permet d’économiser sur le choix des servos utilisés sur mes modèles de voltige. Il a fait ses preuves depuis longtemps. Les servos publiés sont ceux que j’utilise régulièrement.
J’en ai testé beaucoup d’autres dont la liste sera publiée un jour.
J’utilise par ailleurs des altimètres et variomètres à retour d’info au sol qui me permettent de prolonger les vols et d’améliorer ma recherche des zones favorables. Matériel Westech et Pitlab, à suivre…
Je m’intéresse maintenant au retour d’information au sol et aux mesures des paramètres de vol. Mais je ne publierai petit à petit que des données vérifiées et utiles. Diverses platines embarquées me permettent ces mesures et leur enregistrement pour une exploitation fine.
Le pilotage automatique (GPS) a été testé aussi il y a quelques années, mais revient surtout à passer du temps devant le PC. Ce qui ne me convient pas trop.
Servos programmables:
Hitec/Multiplex proposent des servos directement configurables pour des réglages fins.
Ont d’abord été testés deux servos pour les ailes et le fuselage du Troll puis du CATRAX.
Ce sont le D85MG Hitec, de la classe des 13mm pour un usage général sur des modèles de moins de 2m d’envergure (ailes et fuselages) et le HITEC D145SW de la classe des 10mm plutôt pour les ailes et enfin du MD250MW, qui équipe le fuselage du CATRAX et les volets d’ailes du Sylphe.MD250MW
Ces servos programmables en 180° et sur divers autres paramètres m’évitent de devoir modifier moi-même les servos pour ces débattements nécessaires à mes commandes de gouverne pour la voltige totale. Attention, certains servos programmables concurrents ne débattent pas à plus de 170° et sont de ce fait inutilisables pour les commandes que je préconisent: ailerons et empennage à partir des poulies elliptiques.
Cette programmation peut être réalisée à l’atelier avec l’interface
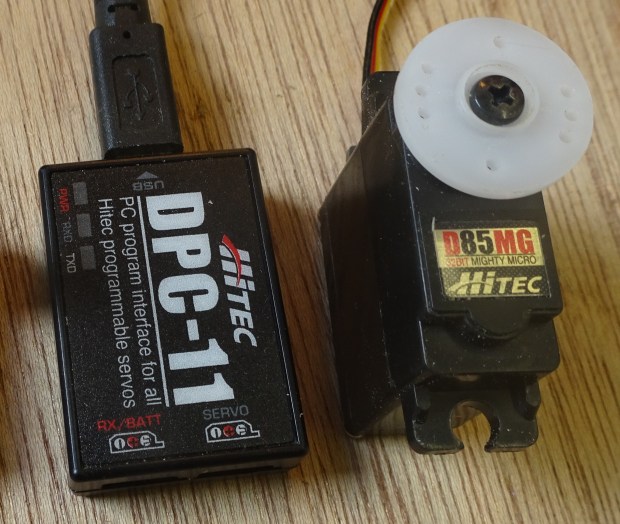 Hitec DPC-11 ou sur le terrain avec un boitier amovible non encore testé.
Hitec DPC-11 ou sur le terrain avec un boitier amovible non encore testé.
La programmation des servos concerne de nombreux paramètres plus ou moins indispensables selon l’utilisation du servo. Mais ces possibilités ouvrent une façon nouvelle d’envisager la programmation de nos modèles: émetteur, récepteur type wingstabi et enfin servos.
Paramètres programmables:
Statut de la fonction:
Réglages du point final (réglage des extrémité de courses, par demi courses)
Direction (sens du débattement selon celui du manche)
Fail-Safe (position stable en cas de perte de signal du récepteur)
Bande morte (zone neutre pour éviter de faire grogner donc consommer le servo)
Vitesse (plus ou moins lente)
Taux de démarrage progressif (pente du démarrage)
Protection de surcharge (adaptation du courant en cas de surcharge)
Résolution
Sauvegarde / Chargement de données dans le servo mais aussi dans un dossier externe)
Réinitialisation du programme (réglages usine)
Paramètres de sensibilité (adaptation aux efforts selon le type de modèle commandé)
Ces différents paramètres demandent une expérimentation et un partage éventuel en cas de réussite ou d’échec….
Concernant les extrémités de course c’est parfait pour mes applications qui demandent du 2*90° ou avec une modification du neutre pour les volets par exemple.
