En voltige planeur RC, le débattement du stabilisateur à 180° ouvre de nouvelles possibilités. La difficulté est de le garder précis autour du neutre à toutes les vitesses et d’obtenir toutes les positions de 0 à 90° en positif et en négatif.

Le stabilisateur monobloc peut débattre sur 180° en utilisant le principe des poulies elliptiques dont les grands axes sont décalés de 90°.

Ce dispositif a déjà été publié dans le livre « Voltige planeur RC » Ce livre explique comment passer les figures de voltiges classiques (catalogue Aresti) et les figures exceptionnelles comme les flips positifs, négatifs. Depuis on peut aussi passer ces flips avec les ailes verticales, en poussant ou en tirant. Attention la structure des ailes doit supporter ces très fortes accélérations.
Sur le Quartz et le Sylphe, le système utilise en plus une poulie de renvoi pour pouvoir décaler le stabilisateur vers le haut.
Sur le Troll et le Guignol, les câbles AR vont directement du servo au guignol de stabilisateur. Leur fuselage a été conçu pour ce passage en direct.

La commande de ce guignol s’effectue par deux câbles en aller retour.

Le guignol de stabilisateur pendulaire est simplement réalisé avec deux plaques de contre-plaqué multi-plis et quelques tubes d’aluminium et de laiton.
Les clefs de stabilisateur en cap de 2mm sont ici espacées de 20mm.
Cet espacement convient bien aux modèles jusqu’à 3m d’envergure et volant vite pour réaliser certaines figures telles que les tonneaux déclenchés.
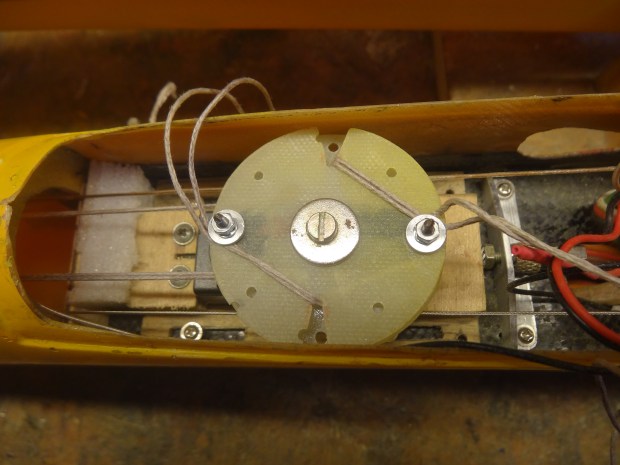
Le tambour elliptique du servomoteur de profondeur:

Deux rondelles de ctp ou de fibre de verre sont disposées de chaque côté d’un guignol à 2 branches. Le dispositif est collé et deux vis de 2mm solidarisent les deux flasques sur le guignol.
Les câbles sont pincés sur la poulie par une vis et une rondelle. La vis bloque la poulie elliptique sur le pignon de sortie du servomoteur.

La rondelle en ctp bloque par frottement les câbles AR. Ici sur un Troll.
Pour faciliter le réglage et la tension des câbles A.R. , l’immobilisation des câbles sur la rondelle du palonnier de servo a été modifiée. Les vis traversant le palonnier sont immobilisées avec de la colle. Une rondelle éventail est entre la rondelle de blocage et l’écrou. Ici sur un Quartz.
Les servomoteurs utilisés doivent comporter un pignon de sortie monté entre deux roulements à bille. Par ailleurs le retour au neutre doit être parfait à toutes les vitesses et enfin le servo doit être capable d’un débattement de 2*90°.
Il suffit en général d’ajouter une résistance de 1.5kohm de chaque côté du potentiomètre de recopie de position.
Se méfier des servos bas de gamme, déjà programmés pour ce débattement, certains servos n’ayant pas un retour au neutre précis. Voir sur ce site les tests des servos utilisés.
Avant d’adopter ce dispositif, d’autres systèmes ont été expérimentés, mais s’ils sont fiables à l’usage, leur réalisation est plus complexe et a été abandonnée.
La vidéo d’ouverture de ce site (sur la page d’accueil) montre bien l’efficacité de ce système.
