Le choix d’un servomoteur doit être adapté à son utilisation.
Puissance, vitesse et précision sous charge constante sont exigibles par l’utilisateur. Les caractéristiques affichées d’un servo bloqué ou tournant à vide sont trompeuses et sans aucune valeur pratique.
Le banc de test ci dessous permet de mesurer la vitesse, la précision de positionnement, la consommation sous différents couples et sous différentes tensions d’alimentation.
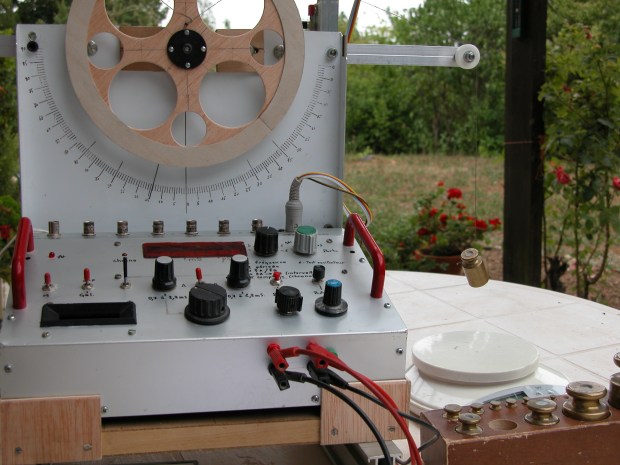
Des masses étalonnées suspendues à un fil de kevlar enroulé sur une roue permet différentes mesures sous des couples constants de valeurs différentes.

Cette vitesse est mesurée à vitesse constante, hors du démarrage du servo.


La vitesse est mesurée électroniquement au 1/100 de seconde, par comptages d’impulsions sous un angle de 60°.
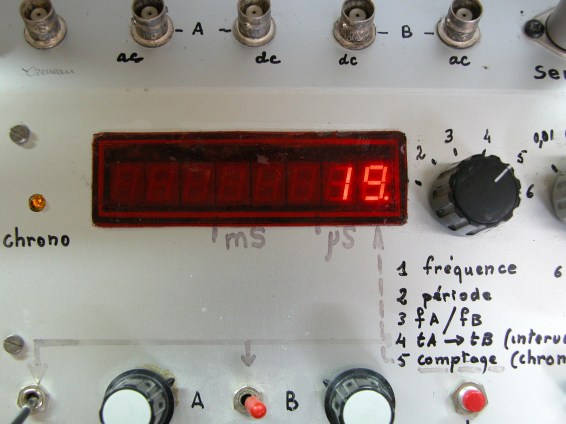
19/100 de seconde pour parcourir 60° sous couple constant…
Deux générateurs de créneaux sont utilisés avec affichage de leur durée respective. On passe instantanément d’une valeur à l’autre par un simple interrupteur. Les durées de créneaux sont affichées en µs ou micro secondes.

Le créneau de commande a une durée de 1.224µs On voit les deux boutons permettant de définir les positions extrêmes à atteindre. L’interrupteur entre les deux boutons permet de passer d’une valeur à l’autre.
La consommation du servo sous charge constante est mesurée sous différentes tensions.

6V

Un milliampèremètre à aiguille pour le courant à l’arrêt.
Affichage numérique pour assurer la précision de lecture et affichage analogique pour les tendances ou instabilités.
La précision de positionnement est évaluée visuellement par déplacement d’une aiguille sur un cadran gradué. Le 1/3 de degré est facilement visualisé.
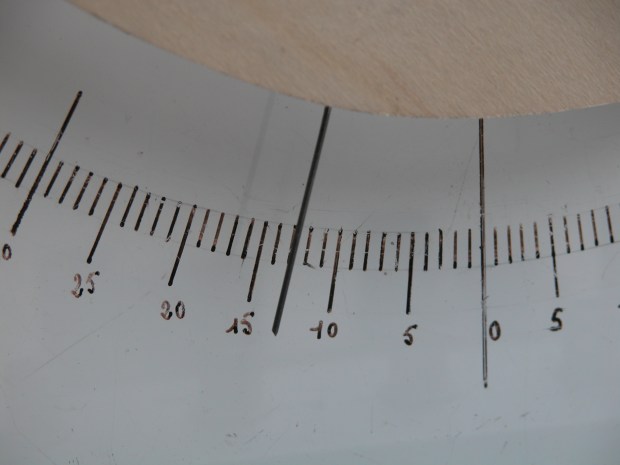
Une précision de 1/3 de degré est facilement évaluée.
Ce banc déjà ancien permet des mesures proches des conditions réelles d’utilisation. Il m’a permis d’économiser sur l’achat des servos. Les résultats sont publiés en toute indépendance. Les fiches publiées sont le résultats de mesures sur plusieurs échantillons répétées plusieurs fois.
Quand à l’usage un servo se révèle défectueux, il est repassé sur le banc de test afin de rechercher les dérives, les erreurs éventuelles de mesure ou les défauts de conception qui auraient pu nous échapper lors d’un premier examen.
L’expérience acquise en compétition et en école de pilotage sur nos modèles permet de bien sélectionner les servos dont nous avons besoin.
La réactivité de nos modèles, visible sur les vidéos montre que nos servos sont efficaces et nos choix pertinents.
