Vers une commande de profondeur 3D
Après la diffusion en 2011 de la vidéo « le chant du Quartz », montrant des évolutions un peu extrêmes pour l’époque (2009/2010) de mon planeur, j’ai découvert quelques autres vidéos montrant des figures peu courantes. Mais aucun de ces modèles ne pouvait réunir à la fois la réalisation de figures classiques et les figures serrées comme les virgules ou micro-boucles positives ou négatives et enfin les vrilles plates entretenues avec changement de sens et démarrage direct aussi bien en ventre qu’en dos. A l’évidence beaucoup s’y sont essayé, mais peu ont vraiment résolus les problèmes contradictoires qui se posent. Ces premières figures déboucheront inévitablement sur de nouveaux enchainements.
Le Madslide de BPLR, puis les différentes versions du Fish montrent certaines aptitudes, surtout grâce aux talents de pilote de leurs concepteurs. Mais les figures sont toujours montrées par une portance significative, obtenue par un vent régulier au bord de la mer, au sommet d’une pente souvent modeste mais bien marquée. N’habitant pas au bord de la mer, je fréquente régulièrement les Alpes et si les ascendances sont parfois puissantes, elles sont principalement d’origines thermiques. Ces ascendances imposent de parcourir de grandes surfaces, donc de voler dans de grands volumes, avec des modèles plus grands et avec des trajectoires nécessairement plus amples. Ces trajectoires plus amples, souvent à grande distance imposent un pilotage précis sur un modèle adapté à toutes les vitesses. Ceci n’incite pas à pratiquer la voltige très près du relief, (VTPR) très largement popularisée par les Bretons. En montagne, par régime thermique, le VTPR est très risqué, surtout à cause des turbulences très irrégulières qui ne permettent pas de s’assurer d’une trajectoire certaine au ras du sol. Ceci ne nous interdit pas de voler parfois très près des rochers mais avec une part de prise de risque un peu déraisonnable. Ceci dit, je suis particulièrement attiré par les évolutions non conventionnelles et ne pouvant pratiquer régulièrement le VTPR, je me suis intéressé à la voltige sortant des figures classiques. La première figure tentée fut un retour aux sources avec la vrille à plat que nous pratiquions il y a fort longtemps avec l’AXEL créé par Jean Claude Bosquet. J’ai simplement perfectionné le principe avec une amélioration technique du système d’incidence différentielle qui de ce fait devenait plus précis. Cette amélioration a déjà été publiée dans feu RCM, puis sur mon blog et enfin reprise par d’autres sans toutefois qu’ils aient pris la peine de citer leurs sources. Pratique devenue courante avec le pillage horizontal des idées.

Perfectionnons la vrille plate
Si la vrille à plat devenait facile à déclencher et à stopper, j’ai voulu en contrôler la vitesse et le sens de façon plus sûre et plus facilement reproductible. J’y suis arrivé en braquant la profondeur de façon extrême. Un peu à la façon des dé-thermalisations utilisées en vol libre. Merci à nos prédécesseurs. Cette disposition appliquée sur le Madslide et reprise par sa version commerciale le Kulbutin, demandait toutefois à être perfectionnée pour devenir vraiment utilisable sur des machines assez grandes, volant en altitude, donc plus loin et plus vite. Ce perfectionnement n’a pas été sans essais et erreurs. La théorie est une chose et qui croit la maîtriser oublie facilement que la pratique en est une autre. Et même quand on a toutes les solutions sur le papier, voire dans l’atelier et même dans la machine, il reste à piloter tout ça convenablement. Des amis pourtant excellents pilotes et compétiteurs de talent, ont mis quelques temps à maîtriser les réglages et procédures copiées sur mes modèles. Dans cette démarche de recherche, il est difficile de distinguer ce qui relève de l’erreur de conception, de ce qui relève de l’imprécision de la réalisation voire de la maladresse du pilote. Parfois les trois se combinent diaboliquement pour vous faire douter. Mais comme le plaisir réside aussi dans l’aventure de ces tout petits domaines, on continue et finalement ça fonctionne et plutôt bien.
Une suite de fausses bonnes solutions
Les solutions toutes faites ne fonctionnent évidemment pas, sinon tout le monde s’y engouffrerait. Je vais vous décrire rapidement mes essais avant de proposer la solution qui me donne toute satisfaction depuis 3 ans maintenant. Ceci incitera surement d’autres chercheurs à devenir des trouveurs pour améliorer mes fausses pistes ou pour aller plus loin sur des pistes originales.
Posons le problème
Pour obtenir un débattement extrême de la profondeur, chacun aura pensé qu’un rapport adéquat des bras de leviers respectifs du servo et de la profondeur devrait suffire. C’est vrai en théorie, mais c’est peu adapté à un pilotage de précision. Il faut en effet garder une très bonne précision autour du neutre pour contrôler l’incidence de l’aile par réglage du Vé longitudinal. Et cette précision est contraire aux lois de la mécanique appliquées ici. Les corrections électroniques du genre double débattement associé à de l’exponentiel, ne font que repousser le problème : ça permet de comprendre momentanément ce que l’on pourrait faire mais ça ne dure jamais bien longtemps. Pour vraiment apprendre à piloter dans ces dimensions il faut pratiquer souvent et dans toutes les conditions. Combien de modèles ont fini en miettes décourageant ainsi leur pilote expérimentateur ? Devant cette évidence facile à constater, j’ai tenté une première solution.
Le mélangeur mécanique
Ce mélangeur mécanique permet à l’aide de deux servos commandés par un mélangeur électronique convenablement paramétré, d’obtenir à la fois de la précision autour du neutre et du débattement extrême. Reste à réaliser un tel mélangeur avec des moyens d’amateur. Ça fonctionne sur table, mais la seule imprécision cumulée des servos et des différents jeux dans les axes et les transmissions rend le dispositif trop flou en pilotage réel. Là encore c’est très bien en dessin et ç’est moins bien en réalité. Il convient donc de trouver autre-chose. En observant les mouvements, cette solution apparait progressivement. Reste à la réaliser.
Dessin du dispositif réalisé puis testé en vol sur un Quartz. 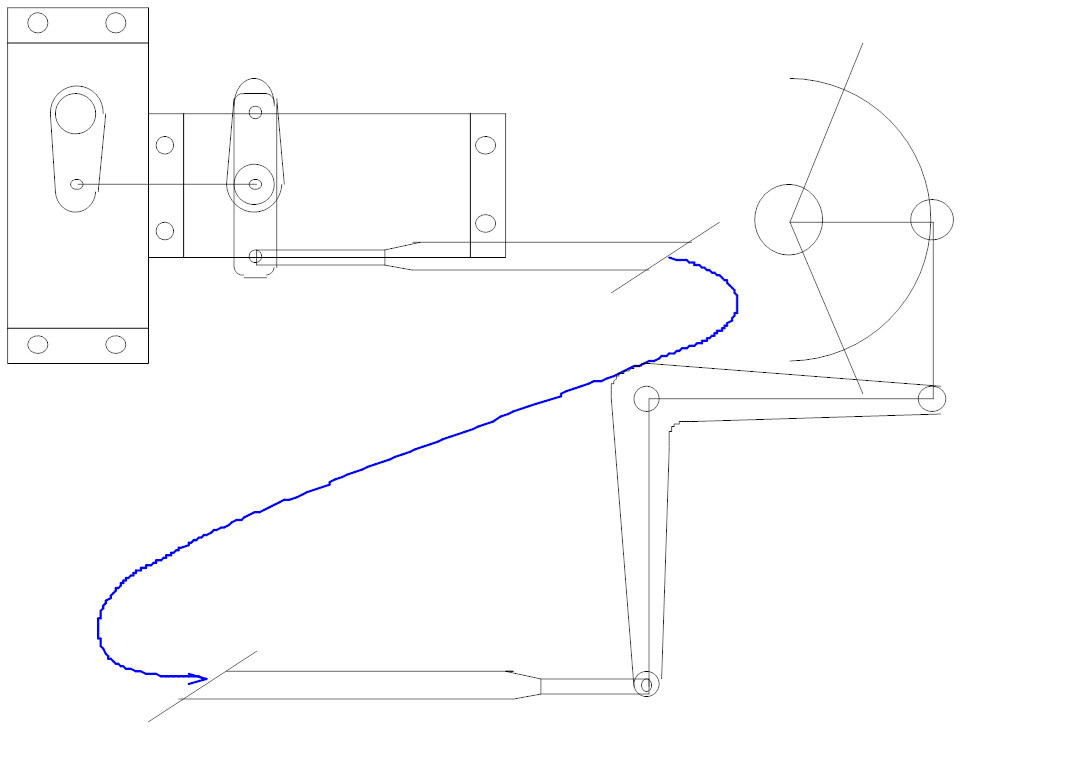
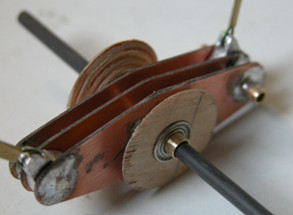
Premiers essais assez rustiques, pour validation du principe !
On avance…
Quelques principes de trigonométrie appliquée montrent qu’en utilisant un débattement tangentiel, il est possible de conserver la précision du neutre du servo près de l’axe de rotation, puis de modifier le débattement en s’éloignant linéairement de cet axe jusqu’à obtenir un débattement suffisant du guignol du stabilo.
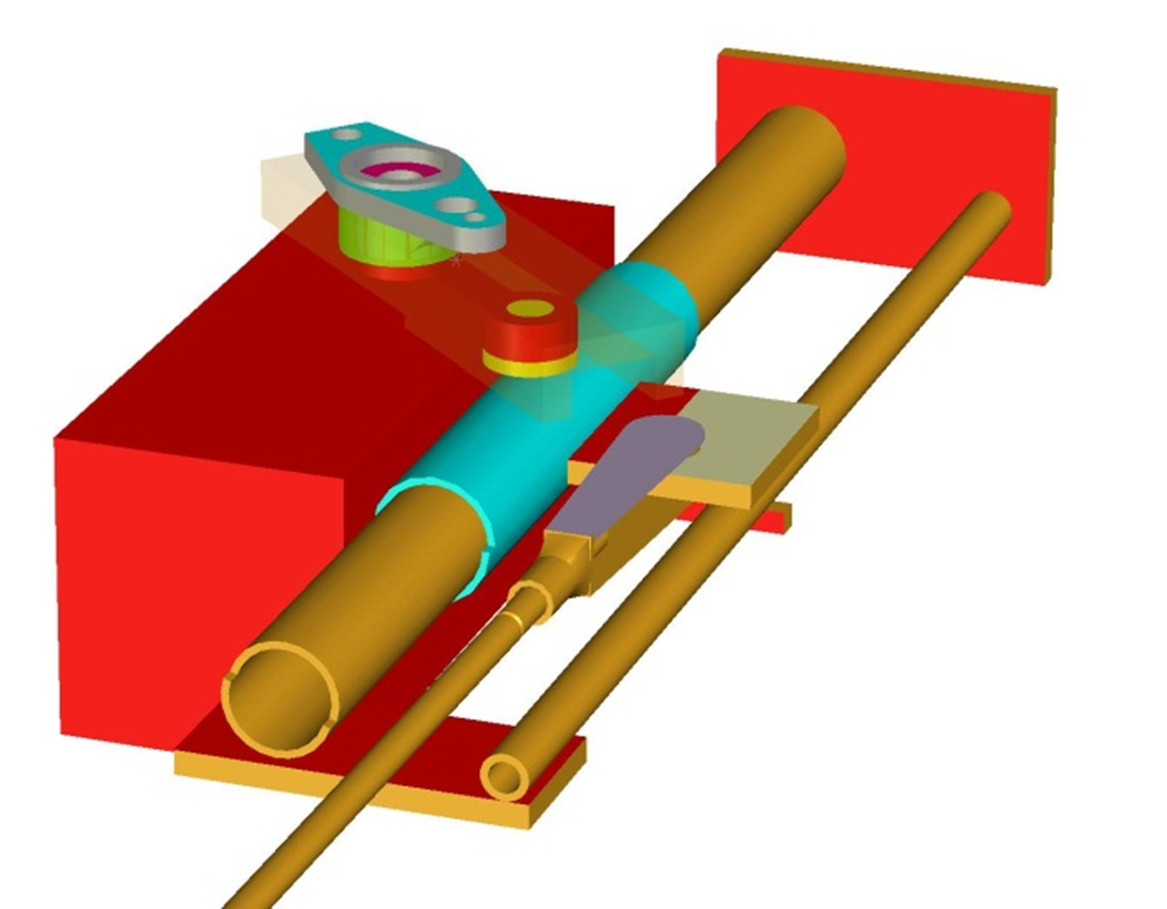




Accroche de la liaison entre le guignol de stabilo et le dispositif.
Les dessins et les photos montrent la réalité du dispositif. Ce système réalisé à différentes échelles a équipé plusieurs de mes modèles et s’est révélé parfaitement reproductible et fiable. Mais il demande un peu de savoir-faire en traçage, perçage et brasure à l’étain. Nul doute que sur ce principe d’autres solutions peuvent être développées. Notamment avec un châssis en ctp, découpé laser. Afin de tirer le meilleurs parti de ce dispositif parfaitement fiable et surtout adaptable à de grands modèles, j’avais quelque peu augmenté la course du servo en ajoutant deux résistances de part et d’autre du potentiomètre de recopie. Les servos de base avec leur 90° de course ne convenant pas pour obtenir le débattement voulu de la profondeur de +/- 90°, tout en conservant un neutre précis. Il faut en outre associer à ce système la combinaison de bras de leviers entre le renvoi à 90° dans la dérive et le guignol support de stabilisateur. Ceci demande aussi d’utiliser des tubes précis ou mieux, des roulements à billes. Pour avoir comparé les deux solutions, avec et sans roulement, il apparait clairement que le système monté sur roulements à billes est beaucoup plus précis et de fait bien plus agréable à piloter. Les roulements doivent être insérés sur tous les axes de rotation y compris les chapes de commande.



A ce stade, outre la difficulté de réalisation du dispositif tangentiel, l’approvisionnement en roulements à billes et la modification des servos, apparait comme autant d’obstacles à une large diffusion du système. J’aurai pu en rester là, mais ça me paraissait trop compliqué pour être vraiment partagé à l’époque.
Mais l’idée fait son chemin
La solution est à l’évidence très proche : côté servo un tambour qui procure un déplacement linéaire proportionnel à l’angle du guignol de servo. Ceci à condition d’utiliser une commande à câbles aller-retour. J’avais bien pensé à ce système depuis le début, mais les essais réels s’étaient révélés décevants à cause de trop d’élasticité des câbles acier utilisés. Pour une profondeur classique ou une commande de direction, ces câbles sont parfaits en aller-retour. Mais pour ce type de profondeur à débattement 180° ça ne fonctionne pas avec assez de précision pour mes modèles. Sur des mousses au bord de la mer, passe encore, mais sur des tout-plastiques de 3m, volant vite c’est rédhibitoire. Pourtant cette idée semblait la bonne, à condition de trouver du câble sans élasticité d’une part et de résoudre la liaison avec le guignol rotatif support du stabilisateur d’autre part. Nous étions dans les années 2000…
Début de solution
Les fils de kevlar jaune semblaient très prometteurs au point de vue de l’élasticité quasi nulle sous les efforts envisagés. Mais ils sont difficiles à trouver et à mettre en œuvre. Après une recherche laborieuse, j’ai fini par trouver le bon câble dans un magasin d’articles de pêche spécialisé dans la pêche aux carnassiers. Après un coup de téléphone pour m’assurer de la disponibilité de l’article, je passe chez le fournisseur qui est opportunément sur mon chemin vers l’ami Michel Clavier (MCMod73). Le rouleau de fibres aramides tressées sera parfait pour mes premiers essais. Attention aux mauvaises imitations qui sont élastiques et ne conviennent absolument pas.



Reste à solidariser ce câble avec le guignol

Il faut absolument éviter la rupture par fatigue excessive des fibres. Donc pas de nœud ni de frottement, ni d’angle vif. Les fibres d’aramide sont très solides mais je ne veux pas courir de risque sur des modèles très fortement sollicités. Il y a d’autres moyens plus originaux pour démolir le matériel. Le guignol de stabilo sera obligatoirement monté sur un roulement à billes. Ce roulement permet de supprimer le jeu et de tendre vraiment le câble AR. Le roulement doit être convenablement dimensionné pour recevoir le tube de clef de rotation du stabilo.
Afin de pouvoir placer le stabilisateur hors du sillage de l’aile et assez dégagé du sol comme c’est l’habitude sur les modèles pour le vol en pleine nature, il faut prévoir un renvoi à 90° dans le bas de la dérive. Ce renvoi est lui aussi réalisé avec des roulements à billes prélevés sur des servos HS.
Ceci pour le Sylphe et le Quartz. Sur le Troll et maintenant le CATRAX, le stabilisateur est dans le prolongement de l’axe du fuselage. Donc dans le sillage de l’aile. Ceci sans aucune conséquence perceptible. Comme quoi certains principes sont à revoir à la lumière de l’expérience…
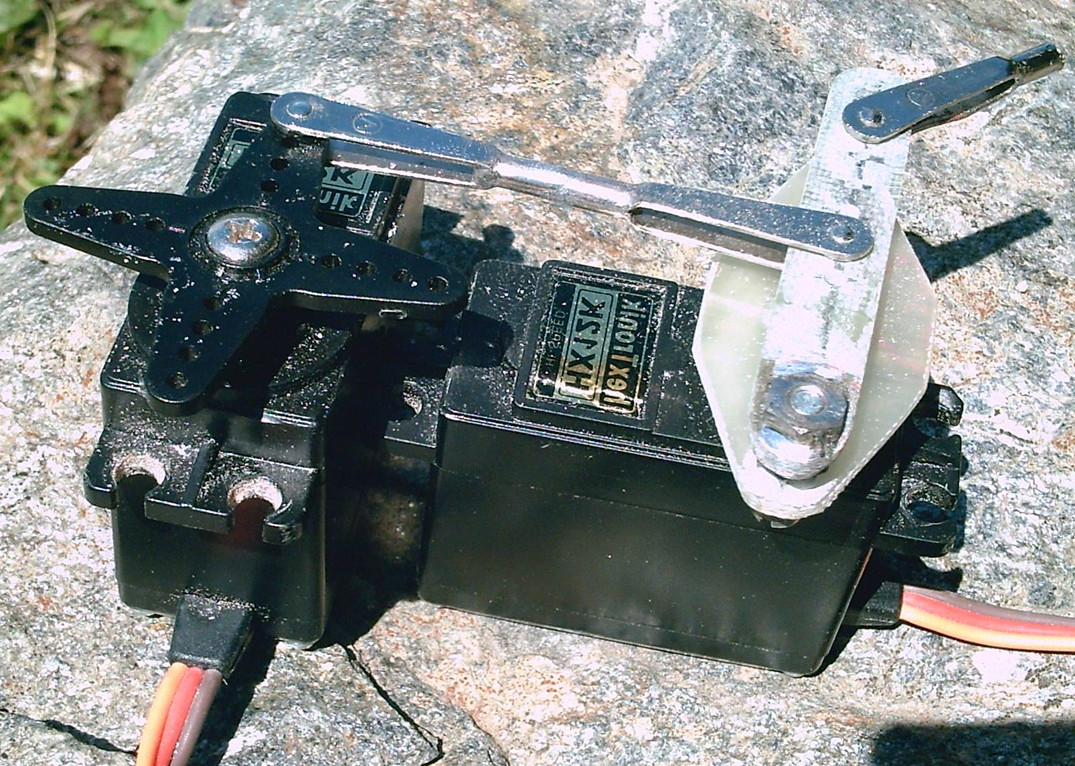
Le câble A.R. est enroulé autour de pions de diamètre minimal de 4mm, assurant la liaison entre les deux flasques du guignol. Cet enroulement permet d’éviter toute rupture du câble par cisaillement, malgré une tension importante de ce câble. Côté servo, il faut réaliser un tambour d’entrainement convenablement dimensionné. Le tambour d’entrainement de circulaire est passé à une section elliptique comme expliqué plus tard. Le servo sera lui-même doté de 2 roulements de part et d’autre du pignon de sortie. Compte tenu des efforts en vol pour certaines figures, un servo puissant, sans jeu et à pignons métalliques est particulièrement recommandé. J’ai soumis pas mal de servos à des tests sur banc avant de choisir finalement à l’époque ce qui se fait de moins cher en la matière. De taille raisonnables ils sont modifiables facilement pour avoir une course de 180°.
Pas mal de servos très chers n’ont pas passé les tests et je n’en parlerai donc pas…. Pas de retour au neutre précis, jeu rapidement rédhibitoire après quelques dizaines de minutes de fonctionnement erreurs de positionnement sous effort etc. Enfin toutes choses que taisent (prudemment ?) les bancs d’essais des revues !


Nous y sommes presque
Pour résumer : la solution choisie à ce moment consistait pour moi à transmettre à l’aide d’un câble A.R., le mouvement rotatif du servo matérialisé sur un tambour vers un guignol de rayon adapté.
La rotation originelle du tambour du servo : +/- 45° = 90° permet par transmission sur guignol ayant le bon rayon d’une rotation de +/- 90° soit 180°. Ceci sans souplesse ni flou autour du neutre.
Restait à définir les bonnes dimensions de ces deux pièces :
Géométrie
La formule utilisée est extrêmement simple à appliquer :
Si R1 est le rayon utile du tambour solidaire du servo, R2 est le rayon de rotation du guignol de stabilo.
R1 couvrira un angle de +/- 45° et R2 devra couvrir un angle de +/-90°.
R2 = ¾ de R1 Exemple chiffré : Si R1 = 2cm, R2 = (2*3) / 4 = 1.5cm.
Ceci n’étant pas la distance séparant les points de perçage, mais bien la distance du point d’application de la force des câbles au centre de rotation du guignol.


Précautions
Les dessins et les photos montrent le détail de la réalisation. Ceci m’a appris qu’il faut procéder à des alignements rigoureux pour éviter tout frottement susceptible de créer de l’usure et à terme une rupture. Les roulements à billes sont indispensables pour un fonctionnement optimal. Le servo sera fixé sur sa platine sans silent-blocks. Le stabilisateur aura un volume suffisant et devra pouvoir débattre de +/- 90° sans obstacle ni frottement. Il devra aussi pouvoir résister à des efforts aérodynamiques non négligeables. Les stabilisateurs du Quartz sont tout-fibre, avec longeron vertical en carbone.
Le servo de profondeur est monté sur glissière pour permettre une tension du câble aller-retour.
Conclusion provisoire
Cette recherche de plus d’agilité sur mon Quartz m’a bien occupée. Elle m’a permis d’explorer de nouveaux domaines d’évolution d’un planeur, assez rarement abordés. Pouvoir réaliser à la fois des micro-boucles (flips) où le planeur tourne quasiment autour de l’axe des ailes, des figures déclenchées avec des arrêts précis, des vrilles plates ventre et dos avec contrôle de la vitesse de rotation et changements de sens ouvre de nouveaux espaces d’évolution fait partie des défis intéressants à relever. Le planeur peut descendre ainsi verticalement puis repartir, effectuer des culbutes dos et ventre, tourner des vrilles directement après des déclenchés et doser ceux-ci en toute sécurité. Si des réglages adaptés apportent plus de facilité, il faut toutefois admettre qu’un peu d’entraînement est utile. Une réalisation soignée permet de se passer de doubles débattements qui à terme finissent par créer des situations dangereuses. Surtout près du sol. Il sera donc prudent de tester ces nouveaux dispositifs avec une bonne marge d’altitude. Comme le niveau de pilotage recommandé n’est pas très courant, il est peu probable qu’un développement commercial n’apparaisse de sitôt. Ça laisse le champ libre aux amateurs de saine technique et de sensations. Si je recommande vivement aux amateurs d’expérimenter ces systèmes, je signale aux professionnels que les solutions proposées sont protégées. Me contacter en cas d’utilisation commerciale.
La solution adoptée après ces essais sera présentée dans un prochain article.
