La « mad-dérive »

J’ouvre ce quatrième article avec une photo de la mad dérive du Svolazzo, parce que Stéphane Combet m’a provoqué à créer ce dispositif à la suite de ses vols sur le Troll qu’il possédait déjà à l’époque. Ayant découvert l’intérêt du mad stab sur ce Troll, il a spontanément pensé à rechercher le même effet en lacet. Il avait à ce stade constaté les travaux sur mad-rudder (avec différents niveaux de succès) d’au moins 4 modèles : l’Aeroglide de Steve Lange et Mickael Richter (2012, Californie, cliquer pour la vidéo), le Fluid 2m de Shane Spoor (2013, Australie, cliquer pour la vidéo), le Flips de Julien Bultheel (2014, France, cliquer pour la vidéo) et le Stiletto modifié par Pierre Frémion (2017, France, cliquer pour la vidéo). Il fallait donc mettre en œuvre le dispositif et créer la chaîne de commande sur nos modèles. Ceci afin de réaliser des descentes tranche à partir du haut des renversements. D’autres figures sont apparues à l’usage de ces dispositifs maintenant bien au point.
Nous avons donc cheminé en parallèle en partageant nos observations, suggestions et remarques diverses. Un premier essai en commun sur la pente enneigée du club de Vienne vers Noël 2016 nous a montré certaines limites de nos solutions. D’autres essais en montagne (2017) nous ont montré que nous étions sur la bonne voie mais sans pouvoir vraiment valider le système encore mal dimensionné. Enfin j’ai pu réaliser sur le Troll de 2018 un dispositif sérieux et fiable qui s’avère complètement opérationnel et reproductible. Plusieurs Troll en disposent maintenant et satisfont leur pilote. Si bien que ce dispositif testé ensuite sur le CATRAX en 2019 équipera désormais tous mes modèles de voltige. Cette mad dérive équipe donc aussi le Svolazzo, planeur en bois et en kit, créé par Stéphane Combet et distribué par CDdesign.

Associé au capteur altimètre-vario-vitesse/air de Multiplex il permet d’enregistrer des paramètres de vol utiles à la recherche de meilleures performances en vol selon des variantes de dessins des modèles. Mais c’est une autre histoire.
La dérive reprend globalement le dessin des premiers Troll. La partie fixe de l’atténuateur a donc prolongé vers l’avant le volet mobile. La partie fixe inférieure de la dérive reçoit le mad stab et son dispositif de positionnement. Il a donc fallu bien proportionner le dessin de ces différents éléments.
Le dessin de la partie mobile ayant été défini après plusieurs essais, il a fallu trouver la façon d’articuler le tout et d’entrainer là encore avec précision la rotation de ce volet mobile de grande surface.
L’axe de rotation est un jonc de carbone de 2mm inséré dans un tube aluminium de 3mm. Dans le bas une vis sert de pivot et repousse le jonc de carbone dans un palier horizontal fixé en haut de la partie fixe de la dérive.


Les deux roulements à bille s’appuient sur des portées incrustées dans la fermeture de la partie fixe de la dérive. Ceci permet de tirer fermement sur les câbles aller-retour de contrôle de la dérive mobile. Tout le système est démontable pour la maintenance.
Les puristes pourront critiquer la peinture du modèle…
Cette version du Troll m’a permis de valider certaines options comme l’envergure portée à 2.50m et à 3m avec des rallonges elliptiques. Ce qui en fait un gratteur redoutable…
La poulie horizontale en c.t.p. 2mm est traversées par deux jonc verticaux en carbone (2mm) destinés à raidir le volet mobile de dérive. Ceci évite que le volet ne se courbe en vol sur les déclenchés et ne se coince, avec tous les effets indésirables conséquents. Ceci est arrivé plusieurs fois sur mon précédent Sylphe.
C’est bien entendu maintenant corrigé sur chacun de mes modèles et sur les modèles de mes amis.
L’ensemble des pièces de fermeture de dérive, d’articulation et de support a nécessité un dessin 2D. Les pièces en c.t.p. de l’empennage de tous mes modèles sont découpées laser. De même pour les charriots mobiles et la platine servo.
L’animation de la dérive du Troll est maintenant assurée par un servo programmable débattant à 180°, le D85MG de Hitec. Sur les versions 2.50m et 3m du Troll, un peu plus lourd donc rapides, j’utilise des MD250 MG de Hitec là aussi programmables. Ces servos sont vissés sur des charriots mobiles en c.t.p. 2mm. Le glissement de ces chariots sur la platine servo permet d’assurer la tension des câbles AR. Le maintien en position du charriot mobile est assuré par une vis et des écrous qui poussent ou tirent les charriots.
Charriot mobile du CATRAX et sa poulie à moyeu elliptique.
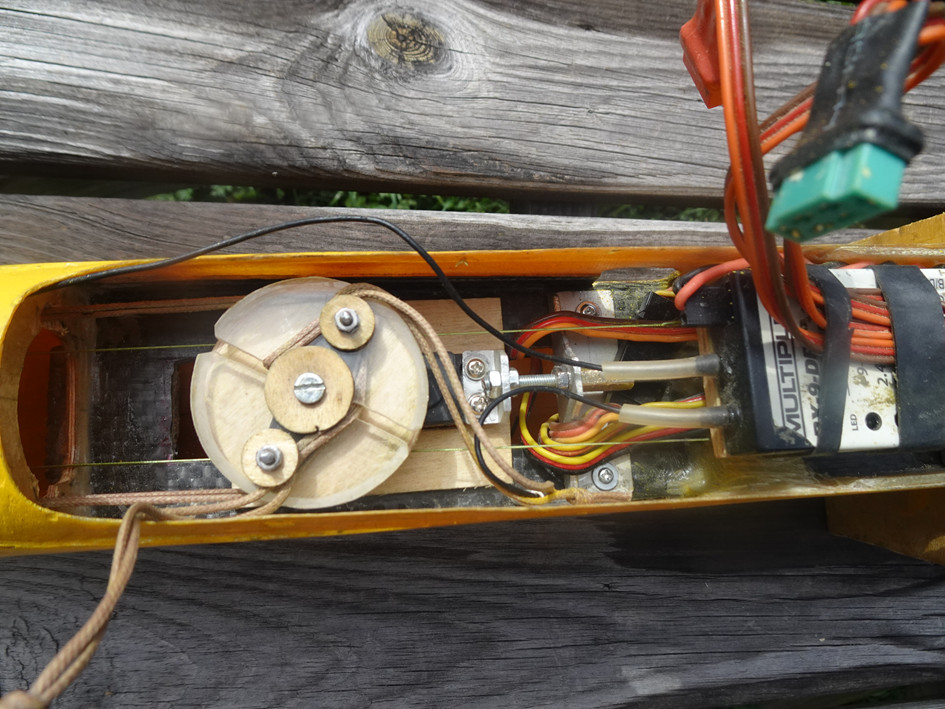
La platine servo est en carbone et le charriot en c.t.p. 2*2mm. Noter sur les fils d’antenne du récepteur les bouts de gaine souple évitant la coupure interne des antennes. Le passe fil d’origine étant trop dur pour assurer cette fonction. Une antenne plonge à la verticale et l’autre est guidée horizontalement vers l’arrière du planeur. Le fuseau est ici en fibre de verre. S’il était en carbone, il faudrait faire sortir les antennes ou mieux les laisser perpendiculaires sous la bulle en fibre de verre donc transparente aux ondes 2.4GHz.

Conclusion (toute provisoire)
La commande d’empennage de ces planeurs permet une voltige très agressive et spectaculaire. Mais elle permet aussi de gratter par tout petit temps et donc finalement de voler dans toutes sortes de conditions. Ce qui permet de voler souvent et partout. La réalisation de ces commandes exige un travail soigné où l’à peu près et le « ça ira bien comme ça » n’ont pas de place et conduisent à la destruction du modèle. J’ai eu la chance de compter sur la bonne volonté, les remarques constructives et les aides dans divers domaines de mes amis François M. Stéphane C. Rémy C. Jérôme S. Steve L. et Denis D. Ils sont tous pilotes voltigeurs de talent et savent ce que construire et innover demande d’outillage, de savoir-faire et de temps. Qu’ils en soient chaleureusement remerciés. C’est comme cela que je conçois le travail d’équipe, fait d’échanges et d’aides diverses. Ça ajoute encore aux plaisirs de la voltige totale.
François Cahour.
